Multi-Drone Tracking with YOLO and PX4 in Simulation
This project implements a multi-drone tracking system using real-time object detection with YOLOv11 in a Gazebo simulation environment. The goal is to simulate how autonomous drones can visually track and follow moving targets—an essential capability for applications like search and rescue, surveillance, and cooperative robotics.
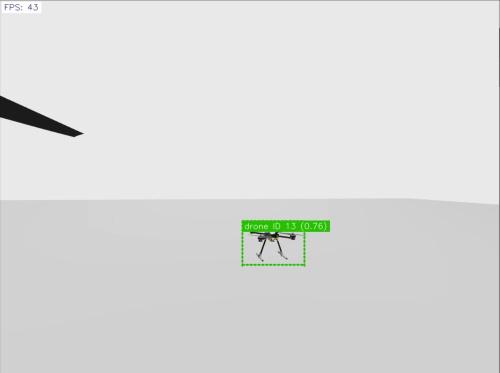
In the simulation, one drone is equipped with a simulated onboard camera and acts as the “observer,” while the second drone moves along a predefined path. Using YOLOv11, the observing drone continuously processes the camera feed to detect the moving drone in real time. Based on the detected position, it adjusts its yaw (orientation) to keep the target centered in its field of view.
The system is built on a modular architecture that integrates computer vision and autonomous flight control:
- Gazebo provides a realistic 3D simulation environment.
- PX4-Autopilot manages the drone’s low-level control.
- MAVSDK-Python is used to command the drone's movement programmatically.
- UDP communication enables coordination between detection and flight control modules.
By combining vision and control in a simulated setting, this project allows for safe and repeatable testing of drone tracking strategies. It also sets the foundation for scaling up to real-world multi-agent systems.

You can check the source code here: https://github.com/assuncaopaulo7/Drone_tracking